Fast-SCNN快速语义分割
论文名:Fast-SCNN: Fast Semantic Segmentation Network
作者:Rudra P K Poudel, Stephan Liwicki, Roberto Cipolla
代码:无github代码,只有modelarts上的baseline
摘要
主要贡献:
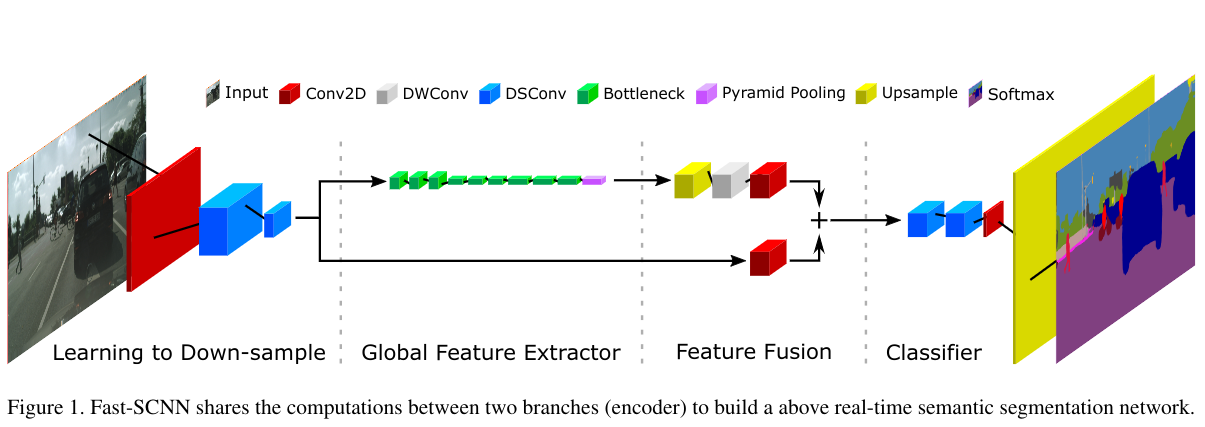
- 提出了一个有竞争性(68.0%miou),并且能在高分辨率(1024x2048)的图片实现实时(123.5FPS)语义分割的算法Fast-SCNN.
- 采用了离线型DCNNs中流行的跳跃连接(skip connection),并提出了一种浅层学习的下采样模块learning to Down-sample,以此更加快速高效地进行多分支低级特征提取。
- 将Fast-SCNN设计为轻量型(low capacity),并证实了无论是使用ImageNet数据集的训练模型多训练几代,还是在添加的粗糙数据中多训练几代的结果是等效的。
DCNNs的效率
高效DCNNs(Diffusion-Convolutional Neural Networks )的常见技术为:
深度可分离卷积(Depthwise Separable Convolutions):
MoblieNet将标准的Conv分解为**深度卷积(depthwise convolutions)**和1×1**点式卷积(pointwise convolution)**通过这样的方式,减少了浮点运算和卷积参数,减少了模型的计算成本和内存需求。
DCNNs的高效重新设计
MobileNet-V2使用**倒置的瓶颈残差块(inverted bottleneck residual blocks)**以分类任务构建有效的DCNN。
ContextNeto使用能够倒置瓶颈残差块设计了一个1两分支网络,以进行有效的实时语义分割。
网络压缩
使用剪枝减小预训练网络的大小,从而实现更块的运行时间,更小的参数集和更小的内存占用空间。
Fast-SCNN严重依赖与深度可分离卷积和残差瓶颈块,还引入了一个两分支模型,该模型将学习内容整合到下采样的模块中,从而允许在多个分辨率级别上进行共享特征提取。网络量化和网络压缩可以正交应用,留待后面的工作。
Fast-SCNN
网络结构图:
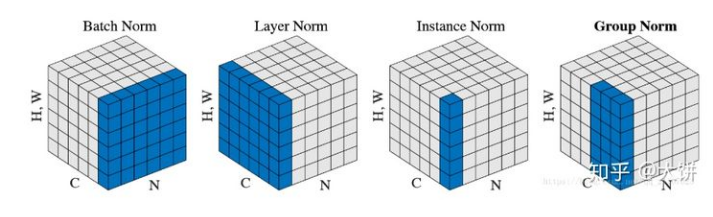
在定义网络的BN层时使用类各种类型的BN层,但是默认都是使用普通的BN层
常规的BN,SyncBN(跨卡BN),FrozenBN(测试阶段使用的BN),GN(Group Normalization)
下采样学习模块(learning to down-sample)
在该模块中使用了三层卷积,第一层是普通的卷积(Conv2D),其余两层是可分离卷积(DSConv),因为图像刚刚输入只有三个通道,使用DSConv的优势并不明显所以,采用普通卷积层。
在下采样学习模块中,使用的步长均为2,然后进行BN和ReLU。卷积核和深度可分离卷积核均为3×3.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
self.learning_to_downsample = LearningToDownsample(32, 48, 64, norm_layer=self.norm_layer)
class LearningToDownsample(nn.Module):
"""Learning to downsample module"""
def __init__(self, dw_channels1=32, dw_channels2=48, out_channels=64, norm_layer=nn.BatchNorm2d):
super(LearningToDownsample, self).__init__()
self.conv = _ConvBNReLU(3, dw_channels1, 3, 2)
self.dsconv1 = SeparableConv2d(dw_channels1, dw_channels2, stride=2, relu_first=False, norm_layer=norm_layer)
self.dsconv2 = SeparableConv2d(dw_channels2, out_channels, stride=2, relu_first=False, norm_layer=norm_layer)
def forward(self, x):
x = self.conv(x)
x = self.dsconv1(x)
x = self.dsconv2(x)
return x
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
|
class SeparableConv2d(nn.Module):
def __init__(self, inplanes, planes, kernel_size=3, stride=1, dilation=1, relu_first=True,
bias=False, norm_layer=nn.BatchNorm2d):
super().__init__()
depthwise = nn.Conv2d(inplanes, inplanes, kernel_size,
stride=stride, padding=dilation,
dilation=dilation, groups=inplanes, bias=bias)
bn_depth = norm_layer(inplanes)
pointwise = nn.Conv2d(inplanes, planes, 1, bias=bias)
bn_point = norm_layer(planes)
if relu_first:
self.block = nn.Sequential(OrderedDict([('relu', nn.ReLU()),
('depthwise', depthwise),
('bn_depth', bn_depth),
('pointwise', pointwise),
('bn_point', bn_point)
]))
else:
self.block = nn.Sequential(OrderedDict([('depthwise', depthwise),
('bn_depth', bn_depth),
('relu1', nn.ReLU(inplace=True)),
('pointwise', pointwise),
('bn_point', bn_point),
('relu2', nn.ReLU(inplace=True))
]))
def forward(self, x):
return self.block(x)
|
全局特征提取器模块的目的在于捕获分割图像的全局上下文信息。该模块直接将下采样学习模块的结果(分辨率为原图的81)作为而输入。该模块引入了MobileNet-V2中提出的有效的瓶颈残差网络(efficient bottleneck residual blocks)。当输入的图像和输出的图像尺寸相同时,使用残差连接链接瓶颈残差块。
在瓶颈残差块中使用了有效的深度可分离卷积,从而减少了参数量和浮点数运算。最后还添加了一个金字塔池化模块(pyramid pooling module 简称PPM),用于汇总基于不同区域的上下文信息。
在各层的详细参数如下表:
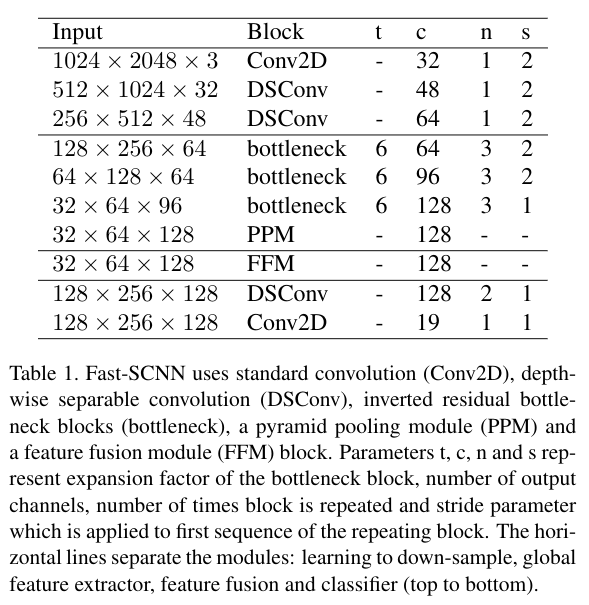
每一条横线分别表示,下采样学习模块,全局特征提取器,特征融合,分类四个总体模块
其中t,c,n,s分别表示瓶颈块的拓展因子,输入通道数,使用该层的次数,步长
瓶颈块的参数表:
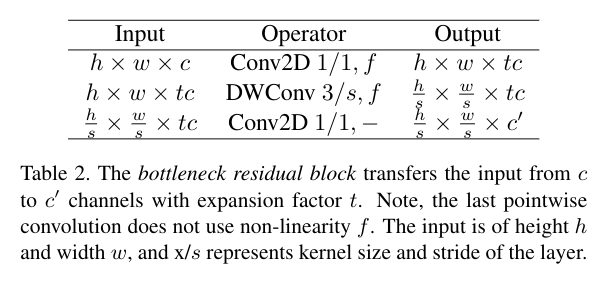
瓶颈残差块将输入为c的图像转化为具有拓展因子t的c`
最后的点卷积不适用非线性函数f
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
|
self.global_feature_extractor = GlobalFeatureExtractor(64, [64, 96, 128], 128, 6, [3, 3, 3],norm_layer=self.norm_layer)
class GlobalFeatureExtractor(nn.Module):
"""Global feature extractor module"""
def __init__(self, in_channels=64, block_channels=(64, 96, 128), out_channels=128,
t=6, num_blocks=(3, 3, 3), norm_layer=nn.BatchNorm2d):
super(GlobalFeatureExtractor, self).__init__()
self.bottleneck1 = self._make_layer(InvertedResidual, in_channels, block_channels[0], num_blocks[0],
t, 2, norm_layer=norm_layer)
self.bottleneck2 = self._make_layer(InvertedResidual, block_channels[0], block_channels[1],
num_blocks[1], t, 2, norm_layer=norm_layer)
self.bottleneck3 = self._make_layer(InvertedResidual, block_channels[1], block_channels[2],
num_blocks[2], t, 1, norm_layer=norm_layer)
self.ppm = PyramidPooling(block_channels[2], norm_layer=norm_layer)
self.out = _ConvBNReLU(block_channels[2] * 2, out_channels, 1, norm_layer=norm_layer)
def _make_layer(self, block, inplanes, planes, blocks, t=6, stride=1, norm_layer=nn.BatchNorm2d):
layers = []
layers.append(block(inplanes, planes, stride, t, norm_layer=norm_layer))
for i in range(1, blocks):
layers.append(block(planes, planes, 1, t, norm_layer=norm_layer))
return nn.Sequential(*layers)
def forward(self, x):
x = self.bottleneck1(x)
x = self.bottleneck2(x)
x = self.bottleneck3(x)
x = self.ppm(x)
x = self.out(x)
return x
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
class InvertedResidual(nn.Module):
def __init__(self, in_channels, out_channels, stride, expand_ratio, dilation=1, norm_layer=nn.BatchNorm2d):
super(InvertedResidual, self).__init__()
assert stride in [1, 2]
self.use_res_connect = stride == 1 and in_channels == out_channels
layers = list()
inter_channels = int(round(in_channels * expand_ratio))
if expand_ratio != 1:
layers.append(_ConvBNReLU(in_channels, inter_channels, 1, relu6=True, norm_layer=norm_layer))
layers.extend([
_ConvBNReLU(inter_channels, inter_channels, 3, stride, dilation, dilation,
groups=inter_channels, relu6=True, norm_layer=norm_layer),
nn.Conv2d(inter_channels, out_channels, 1, bias=False),
norm_layer(out_channels)])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
|
class PyramidPooling(nn.Module):
def __init__(self, in_channels, sizes=(1, 2, 3, 6), norm_layer=nn.BatchNorm2d, **kwargs):
super(PyramidPooling, self).__init__()
out_channels = int(in_channels / 4)
self.avgpools = nn.ModuleList()
self.convs = nn.ModuleList()
for size in sizes:
self.avgpools.append(nn.AdaptiveAvgPool2d(size))
self.convs.append(_ConvBNReLU(in_channels, out_channels, 1, norm_layer=norm_layer, **kwargs))
def forward(self, x):
size = x.size()[2:]
feats = [x]
for (avgpool, conv) in zip(self.avgpools, self.convs):
feats.append(F.interpolate(conv(avgpool(x)), size, mode='bilinear', align_corners=True))
return torch.cat(feats, dim=1)
|
特征融合模块(Feature Fusion Module)
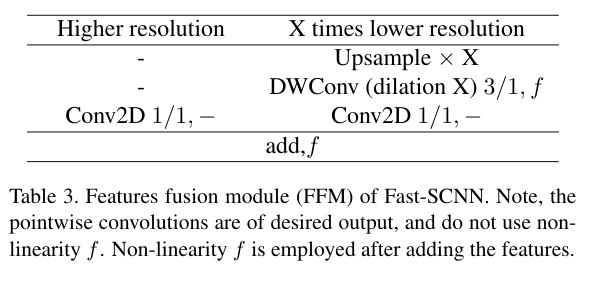
先前下采样学习模块计算的特征图(表的左边)只经过一个1×1的卷积即可,在x次下采样后的结果(经过全局特征提取模块的特征图,表的右边),上采样X次,使用可分离卷积和一个非线性函数,再使用一个1×1的卷积,最后将两个特征图加起来,再使用非线性激活函数f
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
self.feature_fusion = FeatureFusionModule(64, 128, 128, norm_layer=self.norm_layer)
class FeatureFusionModule(nn.Module):
"""Feature fusion module"""
def __init__(self, highter_in_channels, lower_in_channels, out_channels, scale_factor=4, norm_layer=nn.BatchNorm2d):
super(FeatureFusionModule, self).__init__()
self.scale_factor = scale_factor
self.dwconv = _ConvBNReLU(lower_in_channels, out_channels, 1, norm_layer=norm_layer)
self.conv_lower_res = nn.Sequential(
nn.Conv2d(out_channels, out_channels, 1),
norm_layer(out_channels)
)
self.conv_higher_res = nn.Sequential(
nn.Conv2d(highter_in_channels, out_channels, 1),
norm_layer(out_channels)
)
self.relu = nn.ReLU(True)
def forward(self, higher_res_feature, lower_res_feature):
lower_res_feature = F.interpolate(lower_res_feature, scale_factor=4, mode='bilinear', align_corners=True)
lower_res_feature = self.dwconv(lower_res_feature)
lower_res_feature = self.conv_lower_res(lower_res_feature)
higher_res_feature = self.conv_higher_res(higher_res_feature)
out = higher_res_feature + lower_res_feature
return self.relu(out)
|
分类模块(classifier)
在分类模块中采用两个深度可分离卷积(DSConv)和一个普通卷积(Conv2D,纠正一下,之前说过的点卷积是Conv2D)。
为了适应梯度下降,所以在训练中使用了Softmax激活函数,在推理过程中,由于argmax和sorftmax都是单调递增的函数,所以使用argmax代替softmax减小计算开销。
如果需要Fast-SCNN的概率模型,才在推理时使用softmax。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
|
self.classifier = Classifer(128, self.nclass, norm_layer=self.norm_layer)
class Classifer(nn.Module):
"""Classifer"""
def __init__(self, dw_channels, num_classes, stride=1, norm_layer=nn.BatchNorm2d):
super(Classifer, self).__init__()
self.dsconv1 = SeparableConv2d(dw_channels, dw_channels, stride=stride, relu_first=False,
norm_layer=norm_layer)
self.dsconv2 = SeparableConv2d(dw_channels, dw_channels, stride=stride, relu_first=False,
norm_layer=norm_layer)
self.conv = nn.Sequential(
nn.Dropout2d(0.1),
nn.Conv2d(dw_channels, num_classes, 1)
)
def forward(self, x):
x = self.dsconv1(x)
x = self.dsconv2(x)
x = self.conv(x)
return x
|







