Unifying Nonlocal Blocks for Neural Networks
论文名称:Unifying Nonlocal Blocks for Neural Networks
作者:Lei Zhu , Qi She , Duo Li , Yanye Lu , Xuejing Kang , Jie Hu , Changhu Wang
期刊:ICCV2021
代码:https://github.com/zh460045050/SNL_ICCV2021
原文摘要
The nonlocal-based blocks are designed for capturinglong-range spatial-temporal dependencies in computer vi-sion tasks. Although having shown excellent performance,they still lack the mechanism to encode the rich, struc-tured information among elements in an image or video.In this paper, to theoretically analyze the property of thesenonlocal-based blocks, we provide a new perspective to in-terpret them, where we view them as a set of graph filtersgenerated on a fully-connected graph. Specifically, whenchoosing the Chebyshev graph filter, a unified formulationcan be derived for explaining and analyzing the existingnonlocal-based blocks (e.g., nonlocal block, nonlocal stage,double attention block). Furthermore, by concerning theproperty of spectral, we propose an efficient and robust spec-tral nonlocal block, which can be more robust and flexibleto catch long-range dependencies when inserted into deepneural networks than the existing nonlocal blocks. Experi-mental results demonstrate the clear-cut improvements andpractical applicabilities of our method on image classifica-tion, action recognition, semantic segmentation, and per-son re-identification tasks.
摘要
问题描述:nonlocal的设计由于捕捉计算机视觉任务中的大范围空间和时间依赖。但是其缺乏图像或者视频中各元素之间丰富的结构化信息进行编码的机制。
工作:本文把他看作是一个完全连接的图上生成的一组图过滤。具体来说,当选择切比雪夫图滤波器时,可以得出一个统一的公式来解释和分析现有的非局部区块(例如,nonlocal block,nonlocal stage,双注意力区块)。
此外,通过对频谱属性的研究,本文提出了一种高效,稳健的频谱nonlocal block,与现有的Nonlocal block相比,他在插入到深度神经网络中时,可以更稳健更灵活地捕捉到长距离的依赖关系。
介绍
在实践中,多个卷积运算堆叠出来的感受野存在两个问题:
重复的卷积运算会带来更高的计算和内存成本,以及过拟合的风险
堆叠更多的层不能总是增加有效的感受野
这两个问题表明,卷积层可能仍然缺乏有效模拟这些依赖关系的机制。
Nonlocal Block
nonlocal block计算每个位置的特征和所有可能的位置之间的配对的加权和,其计算方式可以使用公式1表示:
公式 1 : F ( X i , : ) = ∑ j [ f ( X i , : , X j , : ) g ( X j , : ) ] ∑ j f ( X i , : , X j , : ) 公式1:F\left(\boldsymbol{X}_{i,:}\right)=\frac{\sum_{j}\left[f\left(\boldsymbol{X}_{i,:}, \boldsymbol{X}_{j,:}\right) g\left(\boldsymbol{X}_{j,:}\right)\right]}{\sum_{j} f\left(\boldsymbol{X}_{i,:}, \boldsymbol{X}_{j,:}\right)}
公式 1 : F ( X i , : ) = ∑ j f ( X i , : , X j , : ) ∑ j [ f ( X i , : , X j , : ) g ( X j , : ) ]
其中X ∈ R N × C 1 X \in \mathbb{R}^{N \times C_{1}} X ∈ R N × C 1 f ( ⋅ ) f(\cdot) f ( ⋅ ) g ( ⋅ ) g(\cdot) g ( ⋅ )
公式 2 : g ( X j , : ) = X j , : W Z W Z ∈ R C 1 × C s 公式2:g\left(\boldsymbol{X}_{j,:}\right)=\boldsymbol{X}_{j,:} \mathbf{W}_{Z}\\ \mathbf{W}_{Z} \in \mathbb{R}^{C_{1} \times C_{s}}
公式 2 : g ( X j , : ) = X j , : W Z W Z ∈ R C 1 × C s
其中N表示的是每一个特征的所有位置,C 1 和 C s C_1和C_s C 1 和 C s
当把NL块插入到网络结构中时,会添加一个带有权重矩阵W ∈ R c S × C 1 W \in \mathbb{R}^{c_S \times C_1} W ∈ R c S × C 1
公式 3 : Y i , : = X i , : + F ( X i , : ) W 公式3:\boldsymbol{Y}_{i,:}=\boldsymbol{X}_{i,:}+F\left(\boldsymbol{X}_{i,:}\right) \mathbf{W}
公式 3 : Y i , : = X i , : + F ( X i , : ) W
尽管NL块和视觉变换器(ViT)都利用了自注意力机制,但前者是在CNN的某个阶段加入的,以感知远距离的依赖关系,而不是像后者这样用来取代CNN中的所有卷积计算。
假设图G包含N个顶点,可以定义一个任意的函数(或信号)向量f = { f 1 , f 2 , ⋯ , f N } \boldsymbol{f}=\left\{f_{1}, f_{2}, \cdots, f_{N}\right\} f = { f 1 , f 2 , ⋯ , f N } f ( i ) f(i) f ( i ) f ^ \hat{f} f ^ f f f
公式 4 : f ^ ( λ l ) = ∑ i = 1 N f ( i ) u l ∗ ( i ) 公式4:\hat{\boldsymbol{f}}\left(\lambda_{l}\right)=\sum_{i=1}^{N} \boldsymbol{f}(i) \boldsymbol{u}_{l}^{*}(i)
公式 4 : f ^ ( λ l ) = i = 1 ∑ N f ( i ) u l ∗ ( i )
其中λ = [ λ 1 , ⋯ , λ l , ⋯ ] \boldsymbol{\lambda}=\left[\lambda_{1}, \cdots, \lambda_{l}, \cdots\right] λ = [ λ 1 , ⋯ , λ l , ⋯ ] U = [ u 1 , ⋯ u l , ⋯ ] \boldsymbol{U}=\left[\boldsymbol{u}_{1}, \cdots \boldsymbol{u}_{l}, \cdots\right] U = [ u 1 , ⋯ u l , ⋯ ] f ^ ( λ l ) \hat{f}\left(\lambda_{l}\right) f ^ ( λ l ) u l , u l ∗ u_l,u_l^* u l , u l ∗ U T U^T U T
公式 5 : f ( i ) = ∑ i = 1 N f ^ ( λ l ) u l ( i ) 公式5:\boldsymbol{f}(i)=\sum_{i=1}^{N} \hat{\boldsymbol{f}}\left(\lambda_{l}\right) \boldsymbol{u}_{l}(i)
公式 5 : f ( i ) = i = 1 ∑ N f ^ ( λ l ) u l ( i )
图滤波器是一个运算器,他根据特征值U,按照作用于λ \boldsymbol{\lambda} λ g θ g_\theta g θ
公式 6 : O ( i ) x ∗ g g θ = ∑ l = 1 N O ^ ( λ l ) u l ( i ) = ∑ l = 1 N x ^ ( λ l ) g ^ θ ( λ l ) u l ( i ) 公式6:\boldsymbol{O}(i)_{\boldsymbol{x} *_{\mathcal{g}} \mathbf{g}_{\theta}}=\sum_{l=1}^{N} \hat{\boldsymbol{O}}\left(\lambda_{l}\right) \boldsymbol{u}_{l}(i)=\sum_{l=1}^{N} \hat{\boldsymbol{x}}\left(\lambda_{l}\right) \hat{\mathrm{g}}_{\theta}\left(\lambda_{l}\right) \boldsymbol{u}_{l}(i)
公式 6 : O ( i ) x ∗ g g θ = l = 1 ∑ N O ^ ( λ l ) u l ( i ) = l = 1 ∑ N x ^ ( λ l ) g ^ θ ( λ l ) u l ( i )
其中x ^ , g ^ θ , O ^ \hat{\boldsymbol{x}}, \hat{\mathrm{g}}_{\theta}, \hat{\boldsymbol{O}} x ^ , g ^ θ , O ^ O x ∗ G g θ O_{x *_{\mathcal{G}} \mathrm{g}_{\theta}} O x ∗ G g θ
非局部区块的光谱观(The Spectral View of Nonlocal-based blocks)
为了定义非局部的光谱观,本文从将非局部算子的矩阵纳入公式3中,将参数矩阵W W W W s 1 和 W s 2 W_{s1}和W_{s2} W s 1 和 W s 2
公式 7 : Y = X + F ( X ) W = X + A Z W S 1 W S 2 公式7:Y = X + F(X)W = X+AZW_{S1}W_{S2}
公式 7 : Y = X + F ( X ) W = X + A Z W S 1 W S 2
在这个公式7中,A = D M − 1 M A = D_M^{-1}M A = D M − 1 M M = [ m i j ] M=[m_{ij}] M = [ m ij ] M i j = f ( X i , : , X j , : ) M_{ij}=f(X_{i,:},X_{j,:}) M ij = f ( X i , : , X j , : ) f ( ⋅ ) f(\cdot) f ( ⋅ ) D M D_M D M Z = X W Z ∈ R N × C s Z=XW_Z \in \mathbb{R}^{N\times C_s} Z = X W Z ∈ R N × C s W Z ∈ R C 1 × C s 。 W s 1 ∈ R C s × C s , W s 2 ∈ R C s × C 1 W_Z \in \mathbb{R}^{C_1\times C_s}。W_{s1} \in \mathbb{R}^{C_s\times C_s},W_{s2} \in \mathbb{R}^{C_s\times C_1} W Z ∈ R C 1 × C s 。 W s 1 ∈ R C s × C s , W s 2 ∈ R C s × C 1
然后基于公式7,非局部块可以通过将W s 1 W_{s1} W s 1 g θ = { g θ 1 , ⋯ , g θ i , ⋯ , g θ C s } \mathbf{g}_{\theta}=\left\{\mathbf{g}_{\theta}^{1}, \cdots, \mathbf{g}_{\theta}^{i}, \cdots, \mathbf{g}_{\theta}^{C_{s}}\right\} g θ = { g θ 1 , ⋯ , g θ i , ⋯ , g θ C s }
公式 8 : Y = X + F ( A , Z , W s 1 ) W s 2 = X + F ( A , Z , g θ ) W s 2 公式8:\boldsymbol{Y}=\boldsymbol{X}+\mathcal{F}\left(\boldsymbol{A}, \boldsymbol{Z}, \mathbf{W}_{s 1}\right) \mathbf{W}_{s 2}=\boldsymbol{X}+\mathcal{F}\left(\boldsymbol{A}, \boldsymbol{Z}, \mathbf{g}_{\theta}\right) \mathbf{W}_{s 2}
公式 8 : Y = X + F ( A , Z , W s 1 ) W s 2 = X + F ( A , Z , g θ ) W s 2
其中F ( A , Z , g θ ) F(A,Z,g_{\theta}) F ( A , Z , g θ ) W s 2 W_{s2} W s 2 C 1 = C s C_1=C_s C 1 = C s F ( A , Z , g θ ) F(A,Z,g_\theta) F ( A , Z , g θ ) F ( A , Z ) F(A,Z) F ( A , Z )
在这种观点中,非本地算子首先计算定义图谱的亲和矩阵A,然后学习图谱特征的过滤器g θ g_\theta g θ G = { V , A , Z } G=\{V,A,Z\} G = { V , A , Z } v \mathbb{v} v z i ∈ R N × 1 z_i \in \mathbb{R}^{N\times1} z i ∈ R N × 1 g θ i g_{\theta}^i g θ i
定理1:给定一个亲和矩阵A ∈ R N × N A \in \mathbb{R}^{N\times N} A ∈ R N × N Z ∈ R N × C Z \in \mathbb{R}^{N \times C} Z ∈ R N × C { g θ i , g θ 2 , ⋯ , g θ C } \left\{\mathbf{g}_{\theta}^{i}, \mathbf{g}_{\theta}^{2}, \cdots, \mathbf{g}_{\theta}^{C}\right\} { g θ i , g θ 2 , ⋯ , g θ C }
公式 9 : F ( A , Z ) = [ O z 1 ∗ g g θ 1 , ⋯ , O z i ∗ G g θ i , ⋯ , O z C ∗ g θ C ] 公式9:\mathcal{F}(\boldsymbol{A}, \boldsymbol{Z})=\left[\boldsymbol{O}_{\boldsymbol{z}_{1} * \mathcal{g} \mathbf{g}_{\theta}^{1}}, \cdots, \boldsymbol{O}_{\boldsymbol{z}_{i} *_{\mathcal{G}} \mathbf{g}_{\theta}^{i}}, \cdots, \boldsymbol{O}_{\boldsymbol{z}_{C *} \mathfrak{g}_{\theta}^{C}}\right]
公式 9 : F ( A , Z ) = [ O z 1 ∗ g g θ 1 , ⋯ , O z i ∗ G g θ i , ⋯ , O z C ∗ g θ C ]
其中图G = ( V , Z , A ) G=(V,Z,A) G = ( V , Z , A ) O z i ∗ G g θ i ∈ R N × 1 \boldsymbol{O}_{\boldsymbol{z}_{i} * \mathcal{G} \mathbf{g}_{\theta}^{i}} \in \mathbb{R}^{N \times 1} O z i ∗ G g θ i ∈ R N × 1 z i z_i z i
具体来说,每一列向量Z的输出信号的广义实现可用于定理1,将图谱滤波器设置为一组对角线参数矩阵Ω i ∈ R N × N \mathbf{\Omega}^{i} \in \mathbb{R}^{N \times N} Ω i ∈ R N × N
公式 10 : O z i ∗ G g θ i = U Ω i U ⊤ z i 公式10:\boldsymbol{O}_{\boldsymbol{z}_{i} *_{\mathcal{G}} \mathbf{g}_{\theta}^{i}}=\boldsymbol{U} \boldsymbol{\Omega}^{i} \boldsymbol{U}^{\top} \boldsymbol{z}_{i}
公式 10 : O z i ∗ G g θ i = U Ω i U ⊤ z i
其中Ω i = diag ( [ ω 1 , ω 2 , ⋯ , ω n ] ) \mathbf{\Omega}^{i}=\operatorname{diag}\left(\left[\omega_{1}, \omega_{2}, \cdots, \omega_{n}\right]\right) Ω i = diag ( [ ω 1 , ω 2 , ⋯ , ω n ] )
统一现有的Nonlocal-base Blocks
本文锁提出的光谱观提供了一个有效的工具,在图信号处理的基础上分析实验设计的Nonlocal block。为了统一基于定理1的其他nonlocal block,这里使用了切比雪夫滤波器来说明,即用切比雪夫多项式将Ω i \Omega^{i} Ω i Z = z 1 , F ( A , Z ) = U Ω 1 U ⊤ Z Z=z_{1},\mathcal{F}(\boldsymbol{A}, \boldsymbol{Z})=\boldsymbol{U} \boldsymbol{\Omega}^{1} \boldsymbol{U}^{\top} \boldsymbol{Z} Z = z 1 , F ( A , Z ) = U Ω 1 U ⊤ Z Ω 1 \Omega^1 Ω 1
公式 11 : F ( A , Z ) = ∑ k = 0 K − 1 θ ^ k T k ( L ~ ) Z s.t. T k ( L ~ ) = 2 L ~ T k − 1 ( L ~ ) − T k − 2 ( L ~ ) 公式11:\begin{aligned}
\mathcal{F}(\boldsymbol{A}, \boldsymbol{Z}) &=\sum_{k=0}^{K-1} \hat{\theta}_{k} T_{k}(\widetilde{\boldsymbol{L}}) \boldsymbol{Z} \\
\text { s.t. } & T_{k}(\widetilde{\boldsymbol{L}}) =2 \widetilde{\boldsymbol{L}} T_{k-1}(\widetilde{\boldsymbol{L}})-T_{k-2}(\widetilde{\boldsymbol{L}})
\end{aligned}
公式 11 : F ( A , Z ) s.t. = k = 0 ∑ K − 1 θ ^ k T k ( L ) Z T k ( L ) = 2 L T k − 1 ( L ) − T k − 2 ( L )
其中L ~ = 2 L / λ max − I n , T 0 ( L ~ ) = I N , T 1 ( L ~ ) = L ~ \widetilde{\boldsymbol{L}}=2 \boldsymbol{L} / \lambda_{\max }-\boldsymbol{I}_{n}, T_{0}(\widetilde{\boldsymbol{L}})=\boldsymbol{I}_{N}, T_{1}(\widetilde{\boldsymbol{L}})=\widetilde{\boldsymbol{L}} L = 2 L / λ m a x − I n , T 0 ( L ) = I N , T 1 ( L ) = L θ ^ k \hat{\theta}_k θ ^ k
亲和矩阵A受输入特征的影响,而不是使用固定的图结构。因此,所有可能的亲和矩阵的最大特征值存在一个上限,即λ max = 2 \lambda_{\max }=2 λ m a x = 2 L ~ = − A \tilde{L}=-\boldsymbol{A} L ~ = − A
公式 12 : F ( A , Z ) = θ 0 Z + θ 1 A Z + ∑ k = 2 K − 1 θ k A k Z 公式12:\mathcal{F}(\boldsymbol{A}, \boldsymbol{Z})=\theta_{0} \boldsymbol{Z}+\theta_{1} \boldsymbol{A} \boldsymbol{Z}+\sum_{k=2}^{K-1} \theta_{k} \boldsymbol{A}^{k} \boldsymbol{Z}
公式 12 : F ( A , Z ) = θ 0 Z + θ 1 A Z + k = 2 ∑ K − 1 θ k A k Z
其中θ k \theta_k θ k
公式 13 : F ( A , Z ) = Z W 1 + A Z W 2 + ∑ K − 1 A k Z W k + 1 公式13:\mathcal{F}(\boldsymbol{A}, \boldsymbol{Z})=\boldsymbol{Z} \mathbf{W}_{1}+\boldsymbol{A} \boldsymbol{Z} \mathbf{W}_{2}+\sum^{K-1} \boldsymbol{A}^{k} \boldsymbol{Z} \mathbf{W}_{k+1}
公式 13 : F ( A , Z ) = Z W 1 + A Z W 2 + ∑ K − 1 A k Z W k + 1
其中F ( A , Z ) F(A,Z) F ( A , Z ) W k ∈ R C s × C s W_k \in \mathbb{R}^{C_s\times C_s} W k ∈ R C s × C s C s ≠ C 1 C_{s} \neq C_{1} C s = C 1 W s 2 和 W k W_{s2}和W_k W s 2 和 W k W k = W k ∗ W s 2 ∈ R C s × C 1 \mathbf{W}_{k}=\mathbf{W}_{k} * \mathbf{W}_{s 2} \in \mathbb{R}^{C_{s} \times C_{1}} W k = W k ∗ W s 2 ∈ R C s × C 1
公式13给出了nonlocal算子的空间观(spatial view)和光谱观(spectral view)之间的联系,其中图的过滤器是由第k个相邻的节点之间的聚合来表示的,因此,现有的基于非局域的结构可以通过公式13在光谱视图中进行理论分析。本文阐述了现有的5种可以统一的nonlocal blocks的类型。
NL blocks:光谱观(spectral view)中的NL块与定义图为G = ( V , D − 1 , M , Z ) G=(V,D^{-1},M,Z) G = ( V , D − 1 , M , Z )
NS module:光谱观中的NS模块被抗做是G = ( V , D M − 1 , M , Z ) G=(V,D^{-1}_M,M,Z) G = ( V , D M − 1 , M , Z ) W 1 = − W 2 = − W 3 W_1=-W_2=-W_3 W 1 = − W 2 = − W 3
A 2 A^2 A 2 G = ( V , M , Z ) G=(V,M,Z) G = ( V , M , Z ) F ( A , Z ) = M Z W F(A,Z)=MZW F ( A , Z ) = MZ W CGNL blocks:当把所有通道归为一组时,CGNL可以被看作是图G = ( V f , D M f − 1 , M f , v e c ( Z ) ) G=(V_f,D_{M^f}^{-1},M^{f},vec(Z)) G = ( V f , D M f − 1 , M f , v ec ( Z )) V f V^f V f F ( A , Z ) = D M − 1 M f v e c ( Z ) W F(A,Z) = D_M^{-1}M^fvec(Z)W F ( A , Z ) = D M − 1 M f v ec ( Z ) W
CC blocks:在CC块中,G = ( V , D C ⊙ M − 1 C ⊙ M , X ) \mathcal{G}=\left(\mathbb{V}, \boldsymbol{D}_{\boldsymbol{C} \odot M}^{-1} \boldsymbol{C} \odot\right.M,X) G = ( V , D C ⊙ M − 1 C ⊙ M , X )
设计光谱非区域块(Designing Spectral Nonlocal Blocks)
除了统一现有的非区域块,本文提出的"光谱观"(spectral view)也有助于设计具有理论保证的新型非区域块。作为一个例子,我们阐述了一个更合理的非区域块,成为光谱非区域块(Spectral Nonlocal Block,SNL),它人谈基于切比雪夫滤波器,但具有更强的理论基础和稳健性。
基于以上部分,现有的基于非局部的算子使用随机行走归一化(random walk normalized)(NL,NS,CGNL,CC)或非归一化的亲和矩阵A 2 A^2 A 2
现有的非本地块只使用第二项(NL,A2,CGNL,CC)或具有共享权重的一阶近似(NS),而不是完整的一阶近似,这也阻碍了其性能。因此,考虑到这些因素,拟议的SNL块应用了一个对称的亲和矩阵,具有更完整的近似值如公式14所示
公式 14 : Y = X + F s ( A , Z ) = X + Z W 1 + A Z W 2 s.t. A = D M ^ − 1 2 M ^ D M ^ − 1 2 , M ^ = ( M + M ⊤ ) / 2 公式14:\begin{aligned}
&\boldsymbol{Y}=\boldsymbol{X}+\mathcal{F}_{s}(\boldsymbol{A}, \boldsymbol{Z})=\boldsymbol{X}+\boldsymbol{Z} \mathbf{W}_{1}+\boldsymbol{A} \boldsymbol{Z} \mathbf{W}_{2} \\
&\text { s.t. } \quad \boldsymbol{A}=\boldsymbol{D}_{\hat{M}}^{-\frac{1}{2}} \hat{\boldsymbol{M}} \boldsymbol{D}_{\hat{M}}^{-\frac{1}{2}}, \quad \hat{\boldsymbol{M}}=\left(\boldsymbol{M}+\boldsymbol{M}^{\top}\right) / 2
\end{aligned}
公式 14 : Y = X + F s ( A , Z ) = X + Z W 1 + A Z W 2 s.t. A = D M ^ − 2 1 M ^ D M ^ − 2 1 , M ^ = ( M + M ⊤ ) /2
其中F s ( A , Z ) F_s(A,Z) F s ( A , Z ) W 1 , W 2 W_1,W_2 W 1 , W 2
拟议的SNL使用切比雪夫滤波器作为广义的图滤波器,但有一个更彻底的平方,由本文提出的光谱观进行分析。具体来说,他使用对称的亲和矩阵A = D M ^ − 1 2 M ^ D M ^ − 1 2 t \boldsymbol{A}=\boldsymbol{D}_{\hat{M}}^{-\frac{1}{2}} \hat{\boldsymbol{M}} \boldsymbol{D}_{\hat{M}}^{-\frac{1}{2}} t A = D M ^ − 2 1 M ^ D M ^ − 2 1 t
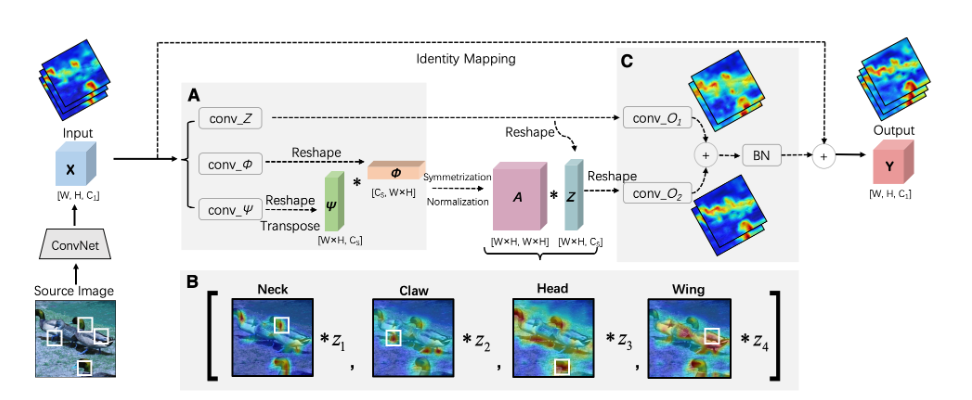
SNL(Spectral Nonlocal Block)实现的细节图
输入特征图X ∈ R W × H × C 1 X \in \mathbb{R}^{W\times H\times C_1} X ∈ R W × H × C 1 W ϕ , ψ , g ∈ R C 1 × C s \mathbf{W}_{\phi, \psi, g} \in \mathbb{R}^{C_{1} \times C_{s}} W ϕ , ψ , g ∈ R C 1 × C s R W H × C s \mathbb{R}^{ WH \times C_{s}} R W H × C s Z ∈ R W H × C s Z \in \mathbb{R}^{ WH \times C_{s}} Z ∈ R W H × C s Φ , Ψ ∈ R W H × C s \boldsymbol{\Phi}, \boldsymbol{\Psi} \in \mathbb{R}^{W H \times C_{s}} Φ , Ψ ∈ R W H × C s f ( ⋅ ) f(\cdot) f ( ⋅ ) W 1 , W 2 ∈ R C s × C 1 W_1,W_2 \in \mathbb{R}^{C_s \times C_1} W 1 , W 2 ∈ R C s × C 1